
MOTIVATION
The funding initiative “Robots for Assistance Functions” supports research and development projects in human-technology interaction that develop flexible and powerful solutions for optimal interaction between humans and robots. The interdisciplinary accompanying project GINA is intended to support the exchange between the funded projects and to ensure the transferability of the various complex development goals and research results of the individual collaborative projects.
GOALS AND PROCEDURE
The aim of this accompanying project is to generalize and deepen the knowledge on the design of high-quality human-robot interaction suitable for everyday use, based on the work in the eight funded projects. Within the three focus areas of “technology”, “product” and “process”, research questions concerning intention and context recognition, aesthetics, and robot personality as well as ethics, law and design practice will be examined. The results are intended to be used by all those involved in this funding measure and to provide valuable support for the joint projects. In this way, a coordinated research of all collaborative projects will be achieved.
INNOVATIONS AND PERSPECTIVES
GINA supports the other funded projects with technological and non-technological expertise. It serves the transfer of knowledge and is intended to identify and limit redundant processes. This way, it is possible to avoid isolated solutions and to create a better linkage.
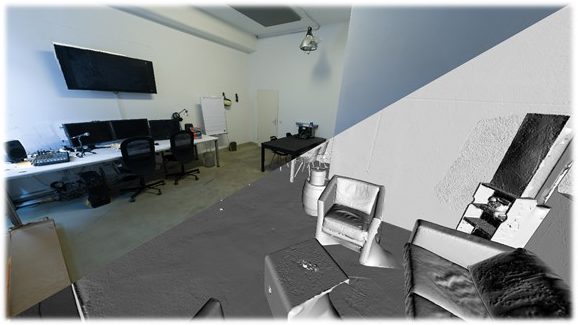
The HSD is concerned with the definition and development of workflows for 3D and VR prototyping and simulation. A special challenge is the research of interaction in simulations. In particular, the areas of 3D modeling, animation of avatars, the use of motion capturing and the implementation of photogrammetry (3D scans) in 3D/VR simulations were considered.

The HSD is responsible for defining and developing workflows for 3D and VR prototyping and simulation. A special challenge is the research on interaction in simulations, in particular regarding the areas of 3D modeling, animation of avatars, the use of motion capturing and the implementation of photogrammetry (3D scans) in 3D/VR simulations.